
«Это не имеет отношения к чипированию или управлению волей»
Чем робот принципиально отличается от живой системы? Можно ли создать робота, неотличимого от нее? Зачем нужно это делать? Какие в этой сфере стоят важные практические задачи и как их выполнить? Могут ли такие роботы быть опасными для человека? Рассказывает Виктор Казанцев, доктор физико-математических наук, заведующий кафедрой нейротехнологий Нижегородского государственного университета, профессор Московского физико-технического института.

— Причин несколько. Исторически, где-то в 1990-е, очень много физиков пошло в исследования процессов в живых системах. Мозг — вершина живых систем, и естественно, физиков это привлекало.
В начале XX века был совершен прорыв в понимании того, как устроен мозг, выявлены основные принципы работы мозга. Было выяснено, что коммуникация в мозге, передача информации осуществляется электрическими импульсами — это основной переносчик информационных сигналов. На этом поле где-то в 1940-е годы произошло несколько знаковых открытий, в частности, английские ученые Ходжкин и Хаксли сумели численно измерить электрические потенциалы в гигантском аксоне (это длинный цилиндрический отросток нервной клетки, по которому идут нервные импульсы) кальмара, за что позже получили Нобелевскую премию.
Сразу после того как это случилось, физики и математики перешли к написанию соответствующих математических моделей. Это было время, когда зарождался искусственный интеллект, а технологии информационные, вычислительные с одной стороны, с другой — оптические, квантовые, технологии микро- и наноэлектроники позволили существенно углубить знания о мозге.

Могут ли биоморфные роботы превзойти своих природных прототипов
Эти технологии нельзя было сделать только биологам. Отсюда очень большое количество физиков разных специализаций, ведь физика — широкая наука. Ваш покорный слуга в 90-е годы, когда еще обучался в магистратуре, аспирантуре, также двинулся в этом направлении, потому что очень большая часть процессов, которые происходят в мозге, описываются физическими уравнениями и математическими моделями. Сейчас все гораздо сложнее и интереснее: среди нас уже и химики есть, из последних тенденций — физики-электронщики активно пошли в этом направлении.
— Мое внутреннее понимание как ученого сейчас стало неким двигателем текущих проектов. Мозг — это такая машина, которая, с одной стороны, имеет свое внутреннее устройство, с другой — не работает без тела. Мозг и тело едины.
— Потому что центральные нейронные сети, которые расположены в ЦНС, условно, в голове, не могут работать без обмена информацией с периферической нервной системой. Этот обмен информацией может быть неполным в случае травм, потери сенсорных функцией, но он должен быть. Если отрубить все сенсорные и двигательные каналы так, что человек не будет чувствовать своего тела,— мозг погибнет. По крайней мере он не будет работать так, как он работает, когда у нас есть органы движения, органы чувств.
Тут нужно сделать определенную оговорку: если мы разберемся, как устроен этот обмен между центральной и периферической нервной системой и сумеем дать мозгу некую искусственную замену, скажем, имплант, мозг это воспримет. Отсюда идет технология нейроинтерфейсов. Сейчас очень много говорится об умных протезах, очувствлении протезов — мы тоже начинаем этот проект прорабатывать. Это все звенья одной цепи, там все удивительно организовано.
Моя уверенность: нельзя заниматься одной молекулой, как делают многие биологи, и говорить, что знаешь, как она устроена. Все гораздо сложнее. Это взгляд физика — нас учили, что мы должны стремиться к обобщениям и поиску симбиоза, синтеза частного и общего в рассмотрении объектов, явлений, процессов.
— Наверное, это элементы спайковых нейронных сетей, успешно моделирующие данные, которые снимаются непосредственно в биологическом эксперименте. Мы много занимались различными моделями ассоциативной памяти, моделями нейронных сетей, которые в мозге управляют моторикой, в частности, это элементы мозжечка, других систем. Но то, что мы делали раньше, было оторвано от периферии. То, что мы делаем сейчас в научных группах здесь, в Нижнем, в Москве на Физтехе, пытаемся добавить к тем нейронным сетям, которые управляют на высоком командном уровне, некие модели периферических сетей — генераторов ритма, работающих в позвоночнике, чтобы создать единую нейроморфную систему управления и сенсорики. Иначе говоря, вы осуществляете движение и получаете обратную связь.
Как установить связь между мозгом и компьютером
Следующим шагом в понимании этой проблемы было то, что для таких нейроморфных или повторяющих мозг нейронных систем необходимо тело, которое тоже должны быть биоморфным — повторяющим биологический прототип. Нейронные сети спинного мозга устроены так, чтобы управлять конечностью, которая работает как манипулятор. В ней есть определенные инструменты — не моторы, а в данном случае мышцы, которые сгибают и разгибают конечность, и это сильно отличается от тех технических устройств, например, колеса, которыми мы привыкли пользоваться. Это задача создания биоморфных роботов, которой мы занимаемся.
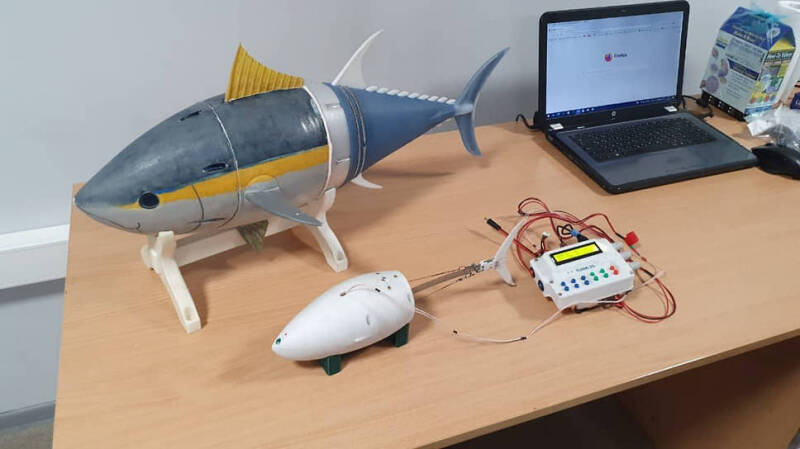
Из последних разработок, которые мы начинали в Нижнем Новгороде, нам удалось сделать очень неплохую машину подводного рыбоподобного робота-тунца, способного перемещаться под водой за счет движений гибкого хвоста.
— Щука тоже есть, скоро начнем испытания.
— Наверное, все люди смотрели советские фильмы, например, «Приключение Электроника». Тогда это была мечта всех кибернетиков — чтобы робот был как человек.
— Именно так. Это знаковый фильм, там очень много пророческих высказываний. Но если посмотреть на текущее состояние дел, ни один робот ни у нас, ни в Америке не двигается как человек. Например, задача поддержания баланса существа, которое стоит на двух ногах, по сути, не решена. Если посмотреть, как устроен человек, как он поддерживает вертикальное положение, первое, что надо сказать,— человек должен быть жив, чтобы стоять на ногах.
Оказывается, для поддержания этого баланса нет чисто механистического подхода. Человек может наклоняться, смещать центр тяжести. В этом случае у него напрягаются мышцы скелета, а не только мышцы ног, как у роботов. По сути, работает все тело для поддержания равновесия. Решать эту задачу нужно с использованием нейроморфного подхода. Есть технические роботы — в Америке робот прыгает, когда его толкают, он чем-то похож на человека, но при пристальном анализе понятно, что до Электроника ему еще далеко.
— Мы пока используем более простые модели роботов-животных. Самым простым и надежным телом показались именно рыбы, которые плавают, двигаясь хвостом.
— Они тоже есть, но начали мы с рыб: если сделать ей нулевую плавучесть и что-то сломается, она не утонет, не улетит, не разобьется. У двуногих роботов задача поддержания баланса перекрывает все остальные. А нам интересны задачи взаимодействия мозга с периферией.
Такого робота мы сделали. Начали в Нижнем Новгороде, продолжаем в Калининграде, в Балтийском федеральном университете под руководством моего ученика Сергея Анатольевича Лобова. По сути, мы сделали машину, в которую начинаем вкладывать систему управления.
Интересно, что задача биомеханики плавания по сути тоже не решена до конца. Во-первых, рыб много, во-вторых, универсальной теории плавания рыбы с точки зрения работы сетей управления и самой биомеханики не существует. Скажем, как хвост работает? Поиск продолжается, и если вдруг кто-то появится, кто говорит, что это знает, сразу давайте мои контакты.
— Совсем по-другому. Мы стали смотреть, провели мониторинг, анализ видеоизображения плавания рыб, и выяснилось, что движения хвоста у него неизохронные, то есть хвост движется неравномерно. Как только мы ввели это в нейронную сеть управления движения хвоста, получили выигрыш в скорости на 30%. При этом энергетика увеличилась всего на 1%. Представляете, какая эффективность! Это то, что отличает все нейроморфные, биоморфные решения,— энергоэффективность.
У всех форм живых существ — рыб, птиц, людей — кинематика движений оптимизирована эволюцией в течение миллионов лет. Оптимизирована именно на то, чтобы потреблять меньше энергии и производить наибольшую эффективность. Поэтому в современном мире, когда и мы, и компьютеры потребляем очень большое количество энергии, остро стоит энергетическая задача, и тут будут важны наши разработки.
— Вы, наверное, видели, что последние лет пять очень активно внедряются и коммерциализируются роботы-собаки. Их можно купить. У меня в лаборатории тоже есть робот-собака — это отдельный проект. Зачем они нужны?
— Нет, ответ другой. Это единственные роботы, которые умеют ходить по ступенькам. Ни один колесный робот этого не может.
— Сейчас востребованы роботы-помощники. Мы живем в инфраструктуре, которая адаптирована под ходячих существ, под людей. Это роботы-ассистенты, которые могут двигаться между этажами. Например, робот может снимать показания счетчиков. Он может быть спасателем при пожаре, других чрезвычайных ситуациях. Или грязное производство, где человеку находиться нельзя.
Те же рыбы, я знаю, что по ним есть очень много проектов у Китая, Южной Кореи. Из гражданских применений они уже используются для отпугивания и увода косяков рыб от места разлива нефти. Управлять обычной рыбой вы не можете, роботом — можете.
То же и с птицами. Робота-птицу мы делаем на Физтехе, есть успехи, но нужно немного подождать. Думаю, что в ближайшее время сможем его продемонстрировать на выставках и конференциях. Такие роботы коммерциализируются уже сейчас, например, в тех же аэропортах их можно использовать для распугивания ворон. Это природная, естественная возможность управлять биоразнообразием в разных средах.
Третье применение, если говорить про птиц,— по сравнению с коптерами, которые сейчас активно применяются, такие решения будут выигрывать, если их сделать эффективными по энергетике. Птица может парить, коптер — нет.
— Не думаю, что мы сможем создать автономного человекоподобного робота в ближайшем будущем, который был бы лучше человека. Причин много, основная — в том, что не решена главная задача: у нас нет технических устройств, которые были бы сопоставимы по эффективности с работой мышц. У нас нет искусственной мышцы.
— Мышцы — это периферия, мы с этого начали. Мозг — это центр, они друг без друга не могут. Если у нас будет аналоговая система, которая сможет работать как мозг, и будут моторы, которые мы напихаем в искусственную руку — это не 50 групп мышц в одном только пальце, работающие независимо. Вот почему мы можем играть на пианино, а робот не может.
— Я не буду напрямую отвечать на этот вопрос: во-первых, задача построения таких киборгов пока неясно как выполнима даже на фундаментальном уровне. Но это не главное. Главное то, что у человечества уже сейчас огромное количество машин, которые могут человека убить гораздо проще и дешевле. Поэтому, на мой взгляд, именно этого опасаться не стоит.
— Есть опасность, что искусственный интеллект, если дать ему возможность принимать решения, станет опасным для человека. Такие системы де-факто будут опасны. С этим надо разбираться. Должна быть глобальная мировая договоренность, как ограничивать возможность автономного принятия решений системой искусственного интеллекта. Я даже не имею в виду военные вещи. Беспилотный автомобиль при определенных условиях может представлять опасность для человека. Такие инциденты уже были. Это все вопросы непростые: развитие идет настолько быстро, что мы не успеваем вводить ограничительные меры.
— Она биолог. Я в биологии знаю даже меньше, чем она. Глобальная задача вот в чем. В науке существует и активно развивается направление по нейрозамещениям функций, или расширению когнитивных функций за счет имплантируемых систем.
Здесь есть определенная опасность, чтобы подавать это в публику, потому что люди сразу начнут говорить про чипирование. Это совершенно не имеет отношения к чипированию или управлению волей — это скорее вещь реабилитационная. Если вследствие инсульта или травмы какая-то область мозга была повреждена, есть надежда восстановить работу этой области, если перекинуть «мостик» с одной стороны, со входа на выход, и заменить естественную нейронную сеть на предобученную нейроморфную на основе мемристерной электроники.
— Да, для нас это пока фундаментальная задача, но, наверное, до таких технологий не так далеко. Можно восстановить утраченную функцию не просто на уровне внешнем, когда, скажем, у вас зрение падает и вам дают очки, а на уровне когнитивном. Это сложная задача, она вызывает много споров, но интересная и перспективная.
Этой задачей Маша Матвеева занимается довольно успешно — у нас и публикации выходят, и она вместе с физиками сделали прототип системы с машинным обучением, которая позволяет этот «мостик» сформировать. Естественно, пока о людях речь не идет, пока они работают на моделях мозга мышей.
— Наверное, то, что я не могу понять,— то, каким образом обеспечивается синергетичность работы различных отделов мозга. Мы знаем, что она есть — разные участки отвечают за разные вещи, но как организовать эту синергию, мы понять пока не можем. Кроме электричества в мозге много всего. Моя ученица Сусанна Гордлеева получила в этом году Госпремию для молодых ученых из рук Владимира Путина именно за то, что добавила к нейронным сетям еще и химические регуляторные клетки — астроциты. Эта многоуровневость, мультимасштабность мозга, его организация на уровне структур — это то, что я не понимаю на данный момент и, наверное, вряд ли смогу понять до конца жизни.
— Останутся, потому что мозг — это сверхсложная система, это миллиарды клеток, которые не просто статично живут, как в компьютере,— они рождаются и умирают. Еще больше связей синапсов, которые также могут возникать по необходимости и исчезать, если не используются. Это целый внутренний мир. Как нельзя объять необъятное, так нельзя объять мозг.
Но чем больше мы понимаем, тем больше мы можем как в медицинских, так и в технических задачах — это антропоморфная робототехника, нейроинтерфейсы, нейроимпланты. Мы можем улучшить качество жизни людей. Это все перспектива нескольких лет, когда, например, можно будет у тех же ампутантов компенсировать практически на 100% не просто двигательные функции, но и то, как человек их чувствует.
Первые работы уже есть — мозг будет воспринимать протез так, как настоящую руку. Это даст новое качество жизни людям с точки зрения социальной реабилитации и полноценной жизни в быту.



